Деформация по кривой |
  
|
Деформация по кривой |
|
Вызов команды:
Пиктограмма |
Лента |
|---|---|
|
3D Модель → Специальные → Деформация → Деформация по кривой |
Клавиатура |
Текстовое меню |
<3DRV> |
Операции > Деформация > Деформация по кривой |
Закон деформации по кривой определяется двумя пространственными кривыми (исходной и целевой). Исходная кривая обозначает деформируемое тело в исходном состоянии; целевая кривая – в результирующем состоянии. Закон преобразования пространства строится так, чтобы обеспечить переход исходной кривой в целевую.
В общем случае исходная и целевая кривые могут иметь произвольную форму. Чаще всего в качестве исходной 3D кривой используется прямая (например, одно из рёбер деформируемого тела или прямой 3D путь).
При построении закона деформации в каждой точке обеих кривых вычисляются вспомогательные ЛСК1(s) и ЛСК2(s) (s – параметр кривой), попарное совмещение которых позволяет уточнить ориентацию получающегося тела в пространстве. Вспомогательные ЛСК вычисляется системой следующим способом: за ось X берётся касательная к исходной/целевой кривой в текущей точке, за ось Y – нормаль к вспомогательной поверхности в данной точке той же кривой, ось Z получается как векторное произведение осей X и Y.
Вспомогательные поверхности для исходной и целевой кривых могут строиться по-разному в зависимости от выбранного алгоритма деформации по кривой:
●Кривая – Кривая;
●Кривая – Спираль;
●Пара кривых – Пара кривых.
3D кривая – 3D кривая
При использовании данного алгоритма каждой из кривых (исходной и целевой) пользователем задаётся дополнительный вектор направления. Для этого указывается ЛСК, одна из осей которой будет определять вектор направления.
Вспомогательная поверхность для обоих кривых (исходной и целевой) формируется как результат перемещения векторов направления вдоль соответствующих кривых методом минимального кручения.
В качестве примера применения данного алгоритма можно рассмотреть одну из решаемых им типовых задач – сворачивание исходного тела в кольцо. Результирующее тело может быть замкнутым.


Кривая – Спираль
Данный алгоритм базируется на предположении, что целевая кривая “спиралеподобна”, т.е. существует пространственная ось, вокруг которой эта кривая “намотана”. Применение данного алгоритма деформации по кривой позволяет “закручивать” тела вокруг осесимметричных кривых наиболее естественным образом.
В этом случае для исходной кривой указывается дополнительный вектор направления (выбором ЛСК и одной из её осей). Вспомогательная поверхность для исходной кривой формируется, как и в предыдущем случае, перемещением заданного вектора вдоль кривой методом минимального кручения.
Для целевой кривой указывается её ось, также выбором ЛСК и указанием нужной оси. Для целевой кривой вспомогательная поверхность формируется как множество векторов, направленных из каждой точки кривой на ось по кратчайшему расстоянию.


Пара кривых – Пара кривых
В данном алгоритме для каждой из основных кривых (исходной и целевой) задаётся дополнительная 3D кривая кручения.
При вычислении закона преобразования вспомогательные поверхности для исходной и целевой кривых формируются как множество векторов, направленных из каждой точки исходной/целевой кривой на соответствующую ей точку кривой кручения.


Создание деформации по кривой
Для создания деформации по кривой используется команда “3DRV: Деформация по кривой”.
Первым шагом после вызова команды является выбор деформируемого тела:
|
<O> |
Выбрать тело для деформации |
Данная опция включена по умолчанию при входе в команду. Деформируемое тело выбирается с помощью После задания деформируемого тела необходимо в окне свойств команды выбрать требуемый алгоритм деформации. Для этого используется выпадающий список параметра “Тип отображения”. В зависимости от выбранного алгоритма деформации будет варьироваться последовательность следующих действий. |
|
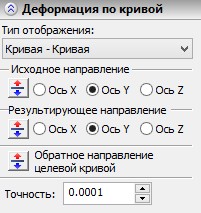
Создание деформации типа “Кривая – Кривая”
Если в списке параметра “Тип отображения” выбрано значение “Кривая – Кривая”, то в автоменю становится активной опция:
|
<O> |
Выбрать тело для деформации |
Данная опция включена по умолчанию при входе в команду. Деформируемое тело выбирается с помощью ![]() в 3D окне или в дереве 3D модели. Выбранное тело подсвечивается.
в 3D окне или в дереве 3D модели. Выбранное тело подсвечивается.
Затем система предложит выбрать исходную кривую:
|
<T> |
Выбрать исходную кривую |
Выпадающий список данной опции содержит список 3D элементов, способных определить 3D кривую. Выбранная кривая помечается в 3D сцене.
Отменить выбор исходной кривой можно с помощью опции:
|
<H> |
Отменить выбор исходной кривой |
После выбора исходной кривой необходимо указать ЛСК, ось которой будет являться вектором направления для исходной кривой:
|
<L> |
Выбрать исходную систему координат |
В окне свойств команды нужно указать ту ось выбранной ЛСК, которая будет служить вектором направления исходной кривой (параметр “Исходное направление”). Одна или две оси ЛСК в диалоге могут быть закрыты для выбора, это означает, что выбор подобного вектора направления невозможен для указанных исходной и целевой кривых.
На основе указанного вектора направления система автоматически рассчитает вспомогательную поверхность для исходной кривой и вспомогательные ЛСК в каждой точке кривой. В 3D окне для наглядности отобразится вспомогательная ЛСК для начальной точки исходной кривой.
Кнопка ![]() позволяет изменить направление получившегося вектора направления исходной кривой, а следовательно, и ориентацию вспомогательных ЛСК.
позволяет изменить направление получившегося вектора направления исходной кривой, а следовательно, и ориентацию вспомогательных ЛСК.
Для отмены выбора ЛСК, задающей вектор направления исходной кривой, используется опция:
|
<C> |
Отменить выбор системы координат |
Целевая кривая и её вектор направления указываются аналогично с помощью следующих опций:
|
<B> |
Выбрать результирующую кривую |
|
<D> |
Отменить выбор результирующей кривой |
|
<M> |
Выбрать целевую систему координат |
|
<N> |
Отменить выбор системы координат |
Меняя оси, задающие векторы направления для обоих кривых, а также направления этих осей, можно подобрать необходимый вариант преобразования. Для получения желаемого результата также можно воспользоваться кнопкой [![]() Обратное направление целевой кривой], позволяющей изменить направление выбранной целевой кривой.
Обратное направление целевой кривой], позволяющей изменить направление выбранной целевой кривой.
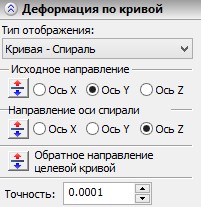
Создание деформации типа “Кривая – Спираль”
Если в списке параметра “Тип отображения” выбрано значение “Кривая – Спираль”, то в автоменю становится активной опция:
|
<O> |
Выбрать тело для деформации |
Деформируемое тело выбирается с помощью ![]() в 3D окне или в дереве 3D модели.
в 3D окне или в дереве 3D модели.
Затем система предложит выбрать исходную кривую:
|
<T> |
Выбрать исходную кривую |
Отменить выбор исходной кривой можно с помощью опции:
|
<H> |
Отменить выбор исходной кривой |
После выбора исходной кривой необходимо указать ЛСК, ось которой будет являться вектором направления для исходной кривой:
|
<L> |
Выбрать исходную систему координат |
В окне свойств команды нужно указать ту ось выбранной ЛСК, которая будет служить вектором направления исходной кривой (параметр “Исходное направление”). В 3D окне отобразится вспомогательная ЛСК для начальной точки исходной кривой.
Кнопка ![]() позволяет изменить направление получившегося вектора направления исходной кривой
позволяет изменить направление получившегося вектора направления исходной кривой
Для отмены выбора ЛСК, задающей вектор направления исходной кривой, используется опция:
|
<C> |
Отменить выбор системы координат |
Целевая кривая и её ось указываются аналогично с помощью следующих опций:
|
<B> |
Выбрать результирующую кривую |
|
<D> |
Отменить выбор целевой кривой |
|
<M> |
Выбрать целевую систему координат |
|
<N> |
Отменить выбор системы координат |
Как и в предыдущем случае, для получения желаемого результата можно использовать кнопку [![]() Обратное направление целевой кривой], позволяющую изменить направление выбранной целевой кривой.
Обратное направление целевой кривой], позволяющую изменить направление выбранной целевой кривой.
Создание деформации типа “Пара кривых – Пара кривых”
При выборе варианта “Пара кривых – Пара кривых” в автоменю становится активной опция:
|
<O> |
Выбрать тело для деформации |
Деформируемое тело выбирается с помощью ![]() в 3D окне или в дереве 3D модели.
в 3D окне или в дереве 3D модели.
Затем система предложит выбрать исходную кривую:
|
<T> |
Выбрать исходную кривую |
Отменить выбор исходной кривой можно с помощью опции:
|
<H> |
Отменить выбор исходной кривой |
Далее необходимо указать кривую кручения для исходной кривой деформации:
|
<K> |
Выбрать исходную кривую кручения |
Кривая выбирается в 3D окне или в дереве 3D модели.
Для отмены выбора исходной кривой кручения используется опция:
|
<L> |
Отменить выбор исходной кривой кручения |
Целевая кривая и её кривая кручения указываются аналогично с помощью следующих опций:
|
<B> |
Выбрать результирующую кривую |
|
|
|
<D> |
Отменить выбор результирующей кривой |
||
|
<M> |
Выбрать результирующую кривую кручения |
||
|
<N> |
Отменить выбор результирующей кривой кручения |
||
Дополнительно в диалоге свойств команды доступна кнопка [ |
|
Динамический просмотр в операциях деформации
В процессе задания/редактирования параметров деформаций в 3D окне динамически отображается будущий результат текущей операции. Для ускорения работы динамический просмотр можно отключить, сняв флажок “Динамический просмотр” в окне свойств команды. Дополнительный параметр “Плотность сетки” регулирует точность сетки, используемой для визуализации результата операции. Увеличение плотности сетки приводит к замедлению пересчёта тел в сцене, но увеличивает точность прорисовки. |
|
В диалоге параметров операции, вызываемом опцией ![]() , можно задать общие параметры операции.
, можно задать общие параметры операции.
Смотри: Содержание, Команды T-FLEX CAD 3D в алфавитном порядке