Автоматическая прокладка трассы



Автоматическая прокладка трассы |
|
Вызов команды:
Пиктограмма |
Лента |
|---|---|
|
Коммуникации → Построения → Прокладка трассы |
Клавиатура |
Текстовое меню |
|
Сервис > Коммуникации > Прокладка трассы |
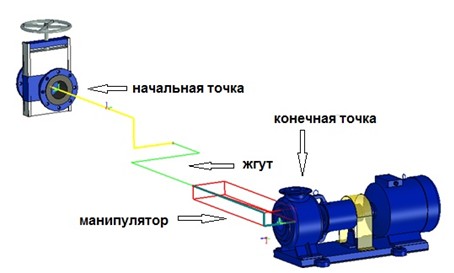
Команда «Прокладка трассы» осуществляет автоматизированную прокладку трассы между выбранными узлами. Для задания траектории среднего участка трассы может быть использован жгут.
Алгоритм действий при работе с командой может быть представлен следующим образом:
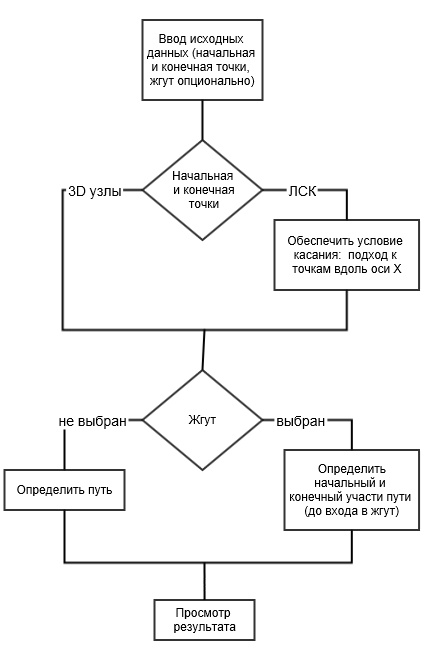
После вызова команды доступны следующие опции:
|
<F> |
Выбрать начальную точку |
|
<S> |
Выбрать конечную точку |
|
<D> |
Сбросить начальную и конечную точки |
|
<L> |
Выбрать жгут |
|
<C> |
Отменить выбор жгута |
|
<N> |
Продолжить |
|
<P> |
Вернуться |
|
<R> |
Продолжить работу команды после применения текущих изменений |
В окне Свойства можно задать параметры создаваемой трассы:
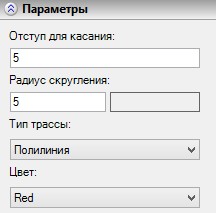
Отступ для касания – задаёт расстояние, на которое участок трассы отступает от точки пересечения с другим участком для построения сопряжения между ними.

- Радиус скругления - задаёт радиус скругления в точках излома трассы.
- Тип трассы: полилиния, сплайн по точкам, сплайн по полилинии – может быть отдельно задан для каждого участка трассы.
- Цвет - задаёт цвет трассы по умолчанию.
Прокладка трассы происходит в несколько этапов. На каждом этапе строится участок трассы. Участок прокладывается по рёбрам манипулятора-параллелограмма или прямоугольника. Этот манипулятор появляется для каждого участка трассы. Можно выбирать рёбра, по которым будет проложена трасса, и задавать длину этих рёбер.
После задания исходных данных для построения трассы – начальной ЛСК ![]() и конечной ЛСК
и конечной ЛСК ![]() и жгута
и жгута ![]() , необходимо нажать кнопку
, необходимо нажать кнопку ![]() Продолжить.
Продолжить.
После этого появляется манипулятор-параллелограмм, с помощью которого нужно указать вариант подхода трассы к первой точке вдоль оси X. Для указания варианта необходимо выбрать нужные рёбра манипулятора.
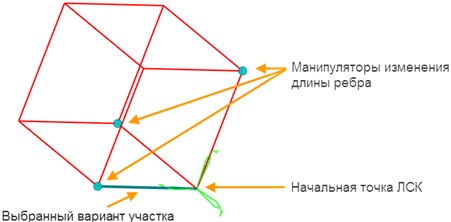
Изменить длину рёбер можно с помощью манипуляторов или в разделе Отступ для касания в окне Свойства.
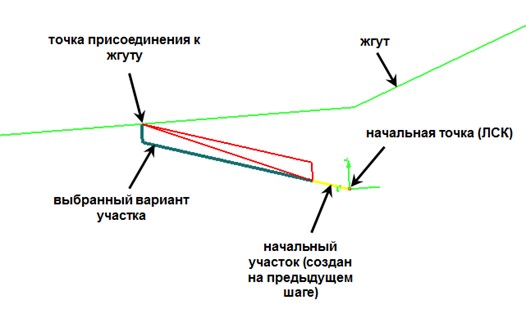
После выбора нужного варианта необходимо нажать ![]() и повторить действия для второй точки. На следующих двух шагах система автоматически находит ближайшие точки для соединения со жгутом и предлагает определить участки пути до этих точек. Действие выполняется аналогично предыдущим, путём выбора рёбер параллелепипеда. Подобным же образом задаётся траектория для построения трассы без использования жгута.
и повторить действия для второй точки. На следующих двух шагах система автоматически находит ближайшие точки для соединения со жгутом и предлагает определить участки пути до этих точек. Действие выполняется аналогично предыдущим, путём выбора рёбер параллелепипеда. Подобным же образом задаётся траектория для построения трассы без использования жгута.
Заключительный шаг – предварительный просмотр результата. Можно подтвердить создание трассы, нажав ![]() , или же с помощью опции
, или же с помощью опции ![]() вернуться на предыдущие этапы для корректировки каких-либо параметров.
вернуться на предыдущие этапы для корректировки каких-либо параметров.
После построения трасса доступна для редактирования стандартными средствами редактирования трасс: можно изменять типы участков, радиусы сопряжения и т.д.