Пример параметрического массива 3D элементов со свободной ориентацией копии |
  
|
Пример параметрического массива 3D элементов со свободной ориентацией копии |
|
Создание параметрического массива аналогично созданию тела по параметрам. Здесь мы рассмотрим создание массива на примере модели винтовой лестницы.
Модель построена как параметрический массив со свободной ориентацией копий на основе 3D фрагмента одной секции лестницы.

Файлы примера находятся в библиотеке Примеры 17, в папке 3D моделирование.Операции\Массив\_Винтовая лестница.grb.
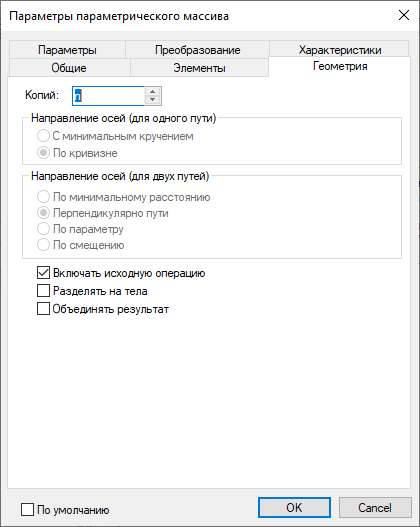
При создании массива таким способом достаточно выбрать тело, задать количество копий и назначить независимую переменную на параметр Номер копии. Используя переменную, принимающую значения номеров копий, можно создать определённые зависимости в полях управляющих параметров, а также в 2D или 3D построениях, от которых, в свою очередь, будет зависеть положение и геометрия исходного тела. В данном примере секция лестницы копируется с изменением положения по высоте и угла поворота относительно оси лестницы.
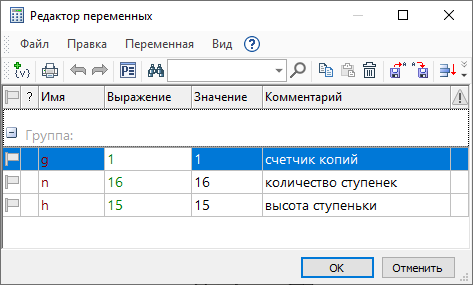
Для удобства работы с моделью в редакторе переменных созданы следующие переменные:
Секция винтовой лестницы вставлена в документ в качестве 3D фрагмента. Данный фрагмент вставлен таким образом, что ось лестницы совпадает с глобальной осью Z. Если бы фрагмент располагался произвольно, то потребовалось бы дополнительно выбрать локальную систему координат с помощью опции:
|
<6> |
Выбрать исходную систему координат |
Её ось Z должна была бы быть направлена по оси лестницы.
В данном примере закон, по которому будет определяться положение каждой копии в зависимости от значения счётчика копий, можно описать в полях управляющих параметров. Параметры массива можно задать в ![]() окне параметров команды
окне параметров команды ![]() Параметрический массив или в
Параметрический массив или в ![]() диалоге параметров массива.
диалоге параметров массива.
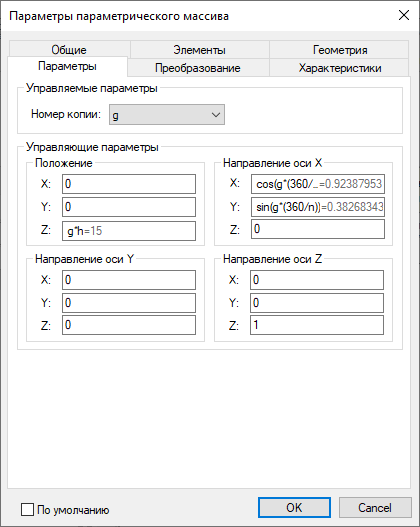
Позиция копий будет вычисляться по линейному закону вдоль глобальной оси Z с шагом, заданным переменной h. Ось Х системы координат текущей копии будет вращаться вокруг оси лестницы. Это движение оси Х определяет группа параметров Направление оси X. Направление оси Z системы координат копии совпадает с осью лестницы и с глобальной осью Z. Направление оси Y системы координат копии должно вычисляться автоматически, поэтому все управляющие параметры в данной группе заданы нулевыми значениями.