Общие сведения о Мостике |
  
|
Общие сведения о Мостике |
|
Цепочки мостика
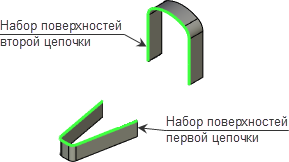
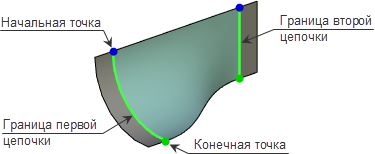
Переходная поверхность, образующаяся в результате операции, определяется геометрией исходных цепочек. Цепочка представляет собой поверхность либо грань твёрдого тела с выбранным ребром, которое будет являться границей с переходной поверхностью. Одна цепочка может быть составлена из нескольких последовательно соединённых поверхностей, которые можно свободно добавлять и удалять в процессе задания операции. Набор поверхностей, составляющих одну цепочку, должен принадлежать одному объекту либо телу.
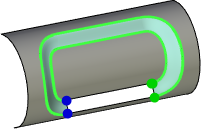
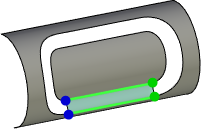
Каждая цепочка имеет крайние точки: начальную и конечную. Ориентация переходной поверхности определяется соответствием крайних точек между цепочками. В случае необходимости можно изменить последовательность соответствия точек, тем самым изменив ориентацию переходной поверхности.
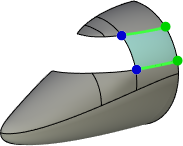
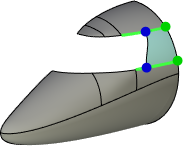
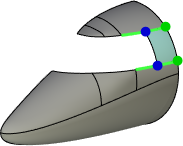
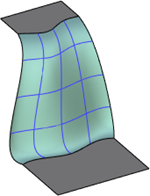
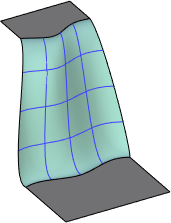
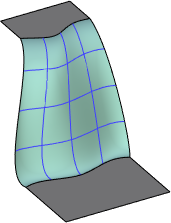
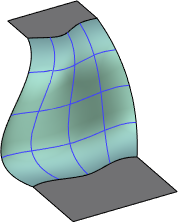
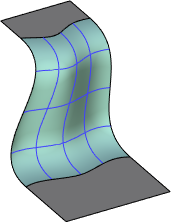
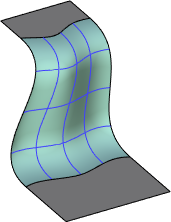
Система обеспечивает возможность управления границами переходной поверхности, сдвигая крайние точки вдоль рёбер исходных цепочек. Значения сдвига можно задать в процентном отношении от длины граничного ребра, в единицах измерения либо определять по геометрической точке, лежащей на границе. При необходимости допускается синхронизировать значения сдвига крайних точек.
Значение сдвига не может превышать длину ребра цепочки.
|
|
|
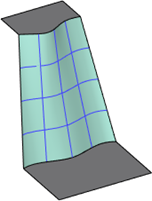
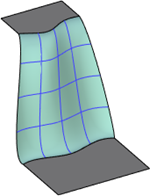
Сдвиг не задан |
Различные значения начальных сдвигов |
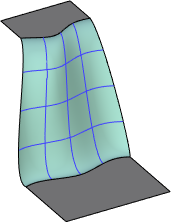
Значения начальных сдвигов синхронизированы |
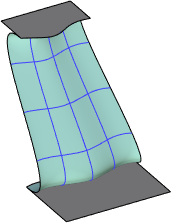
Помимо сдвига допускается смещение переходной поверхности по нормали к граничным рёбрам вглубь исходных цепочек.
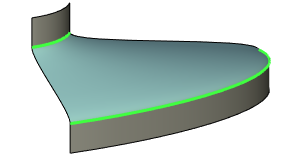
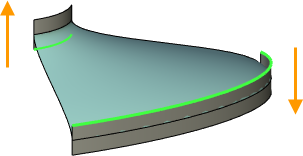
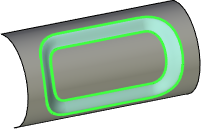
Исходные поверхности могут быть замкнутыми. При работе с замкнутыми цепочками допускается размыкать контур с последующим определением направления обхода.
|
|
|
Контур замкнутый |
Разомкнутый – прямое направление |
Разомкнутый – обратное направление |
Граничные условия
На границе перехода от наборов исходных поверхностей к переходной система позволяет управлять параметрами сопряжения, определяя условие непрерывности – G0, G1, G2. Это позволяет получить более точную поверхность, в том числе с формированием плавных переходов.
Непрерывность G0 означает, что границы исходного набора ограничивающих поверхностей и переходной поверхности совпадают в пространстве.
Непрерывность G1 означает, что не только границы исходного набора ограничивающих поверхностей и переходной поверхности совпадают в пространстве, но и совпадают их направления (касательные).
Непрерывность G2 означает, что помимо совпадения в пространстве и совпадения направления касательных, на границе поверхностей совпадают радиусы их кривизны.
|
|
|
Непрерывность G0 |
Непрерывность G1 |
Непрерывность G2 |
Для условий непрерывности G1 и G2 допускается задавать значение модуля касательной – коэффициента, масштабирующего значение производной в заданном направлении.
|
|
Значение модуля касательной равен 1,0 |
Значение модуля касательной равен 2,0 |
Типы сопряжений поверхностей
Формирование переходной поверхности обуславливается образующими кривыми, соединяющими крайние точки обеих цепочек. Для получения более точной поверхности допускается определять направление этих кривых относительно ограничивающих поверхностей.
|
|
|
Автоматически |
Перпендикулярно |
Изопараметрически |
Доступно три варианта:
•Автоматически. В этом случае направление образующих определяется системой самостоятельно с целью получения оптимального результата.
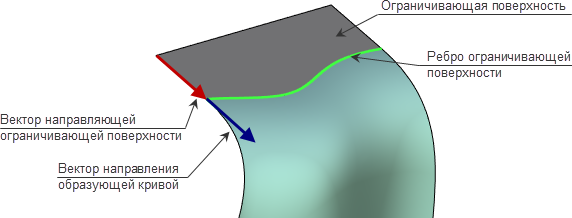
•Перпендикулярно. В этом случае вектор направления образующей кривой перпендикулярен вектору нормали к ограничивающей поверхности и вектору касательной её ребра.
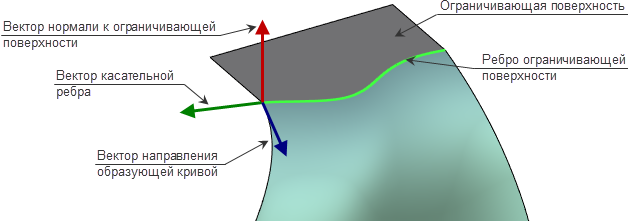
•Изопараметрически. В этом случае вектор направления образующей кривой является продолжением вектора направляющей ограничивающей поверхности.
Помимо направления для образующих кривых допускается уточнять значения модуля касательной в крайних точках.
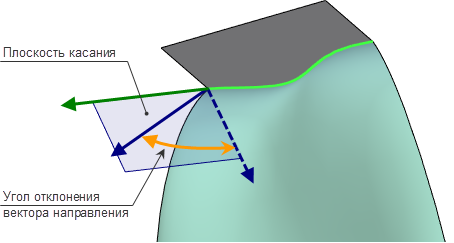
При перпендикулярном и изопараметрическом сопряжении поверхностей наряду с модулем касательной допускается задавать угол отклонения вектора направления образующей кривой в плоскости касания от исходного положения, определяемого способом сопряжения. Плоскость касания определяется вектором касания ребра ограничивающей поверхности и вектором направления.
По умолчанию переходная поверхность строится таким образом, что в результате она образовывает прямое касание с исходной цепочкой. Однако при необходимости допускается изменять направление касания на противоположное.
|
|
Прямое касание |
Обратное касание |
Дополнительные возможности
Результатом операции по умолчанию является отдельная поверхность, сопряжённая с исходными наборами поверхностей. При необходимости система позволяет сшивать исходные поверхности с переходной в одну поверхность.
|
|
|
Набор исходных поверхностей |
Результат без сшивки |
Результат с сшивкой |