Команда "3SA" - Тело по параметрам



Команда "3SA" - Тело по параметрам |
|
Вызов команды:
Пиктограмма |
Лента |
|---|---|
|
3D Модель → Операции → По параметрам |
Клавиатура |
Текстовое меню |
<3SA> |
Операции > По параметрам |
Тело по параметрам представляет собой разновидность тела по траектории (команда "3SW"). Операция служит для создания тел со сложной геометрией поверхностей. Конечное тело получается в результате «движения» профиля по произвольной или специально заданной пространственной траектории. При этом система позволяет задать зависимость изменения параметров профиля от параметров его перемещения.
«Движение» профиля осуществляется за счет многократного копирования исходного профиля. По полученному набору профилей формируется конечное тело. Тело может быть замкнутым. В зависимости от типа геометрии профиля (лист или проволока) конечное тело может быть как твердым, так и листовым.

Ведущим параметром операции является номер копии профиля. Номер копии автоматически изменяется в процессе расчёта операции от 1 до указанного количества с шагом 1.
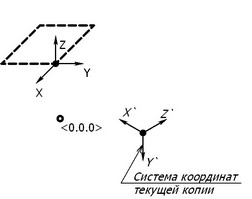
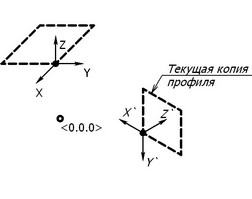
Для каждой копии профиля рассчитывается так называемая система координат текущей копии. Копирование исходного профиля происходит в направлении от исходной системы координат к рассчитанной системе координат текущей копии. В качестве исходной системы координат пользователь может выбрать одну из локальных систем координат модели. Если локальная система координат не выбрана, то в качестве исходной системы координат используется глобальная система координат.
Определение положения начала и ориентация осей системы координат текущей копии производится двумя способами. Можно задавать законы изменения параметров системы координат, описывая их выражениями. Другой способ позволяет использовать 3D пути или поверхности других тел для определения в пространстве системы координат текущей копии. Каждый из способов подробно будет описан ниже. Управляя системой координат копии, пользователь управляет положением и ориентацией каждой копии профиля.
Управление параметрами системы координат копии осуществляется через диалог параметров операции. Можно выделить два основных типа параметров операции - управляемые параметры и управляющие параметры.
Управляемые параметры – их значения рассчитываются автоматически в процессе создания операции. Для считывания значений таких параметров можно назначить независимые переменные.
Независимыми называют те переменные системы, которым присвоено конкретное значение, а не выражение. Они не зависят от других переменных системы. В свою очередь от них могут зависеть некоторые параметры 2D или 3D построений, а также другие (зависимые) переменные.
В блоке управляемых параметров имя независимой переменной всегда выбирается из списка уже существующих в системе независимых переменных.
Параметр «Номер копии» всегда является управляемым. Для него обязательно нужно выбрать независимую переменную, которой будет присваиваться текущее значение номера копии при расчёте операции.
Как можно использовать управляемые параметры?
Чтобы задать зависимость между параметрами, определяющими положение копии в пространстве, и формообразующими параметрами копии профиля, вы можете подставить в поле управляемого параметра имя независимой переменной модели. После расчёта положения системы координат для текущего положения копии профиля, в блоке управляемых параметров присваиваются значения назначенным переменным. Если от назначенной независимой переменной каким-либо образом зависит геометрия профиля, то при создании каждой копии значения управляемых параметров будут присваиваться соответствующим параметрам модели. Таким образом, в зависимости от значений управляемых параметров будет пересчитываться форма профиля.
Переменная, которой присваивается значение номера копии, может указывать на номер строки базы данных.
Управляющие параметры – поля, зависимости в которых задаются пользователем. В поле управляющих параметров может быть вписано произвольное выражение. В данное выражение можно включить любую переменную системы. Например, включите в него переменную, отвечающую за номер копии. При этом получится определённая выражением зависимость данного параметра от номера копии.
Расчёт операции выполняется в следующем порядке: присваивается следующее значение номеру копии, рассчитываются управляющие параметры, вычисляются остальные управляемые параметры (если они есть), пересчитывается исходный профиль с текущими значениями переменных, выполняется копирование профиля.
Правила создания операции
В автоменю становятся доступными следующие пиктограммы:
![]() <R> Выбрать контур
<R> Выбрать контур
![]() <F> Отменить выбор контура
<F> Отменить выбор контура
![]() <1> Выбрать кривую, задающую положение начала координат
<1> Выбрать кривую, задающую положение начала координат
![]() <2> Выбрать кривую, задающий направление оси X
<2> Выбрать кривую, задающий направление оси X
![]() <3> Выбрать кривую, задающий направление оси Y
<3> Выбрать кривую, задающий направление оси Y
![]() <4> Выбрать поверхность, задающую ориентацию оси X
<4> Выбрать поверхность, задающую ориентацию оси X
![]() <5> Выбрать поверхность, задающую ориентацию оси Y
<5> Выбрать поверхность, задающую ориентацию оси Y
![]() <6> Выбрать исходную систему координат
<6> Выбрать исходную систему координат
![]() <7> Отменить выбор элементов, задающих систему координат
<7> Отменить выбор элементов, задающих систему координат
В зависимости от способа определения системы координат текущей копии, некоторые параметры могут являться как управляющими, так и управляемыми. При этом можно выделить два основных способа создания тела с параметрическим изменением профиля:
●Способ свободной ориентации копии
●Способ ориентации копии по путям или поверхностям
В каждом случае используются разные опции автоменю, несколько иная последовательность действий по заданию необходимых элементов и свойств операции. Далее рассмотрим каждый способ отдельно.
Способ свободной ориентации копии
Для создания тела по параметрам достаточно выбрать 3D профиль, задать количество копий и назначить независимую переменную на параметр «номер копии». Используя переменную, принимающую значения номеров копий, можно создать определенные зависимости в полях управляющих параметров, а также в 2D или 3D построениях, от которых, в свою очередь, будет зависеть форма и положение 3D профиля.
Выбрать 3D профиль можно с помощью соответствующей опции в автоменю:
![]() <R> Выбрать контур
<R> Выбрать контур
Количество копий профиля можно назначить в диалоге параметров операции на закладке «Операция».
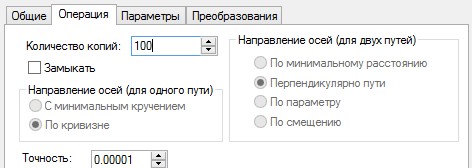
Кроме параметра "Количество копий" на данной закладке присутствует активная опция "Замыкать". Если опцию включить, то тело, которое строится по набору сечений (набору копий исходного профиля), гладко замыкается, как если бы первое сечение было выбрано дважды.
После задания количества копий можно перейти к закладке «Параметры».
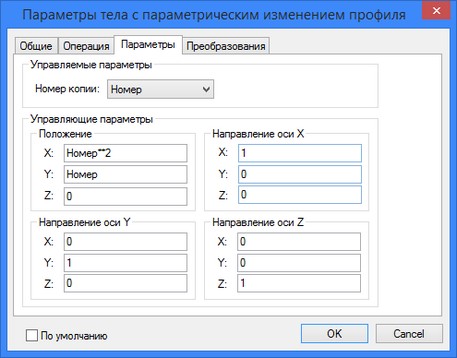
На этой закладке присутствует 2 типа параметров, объединенных под названиями «Управляющие параметры» и «Управляемые параметры».
При создании операции по данной схеме, управляемым параметром является только номер копии, а управляющими являются параметры, отвечающие за положение текущей копии профиля в пространстве. Для удобства выделено 4 группы управляющих параметров: положение, направление оси X, направление оси Y, направление оси Z.
Группа параметров «Положение» управляет координатами X,Y,Z точки, определяющей положение начала системы координат текущей копии.
Остальные параметры задают три вектора, которые определяют ориентацию системы координат текущей копии.
Вы можете явно описать положение системы координат текущей копии как функцию от номера копии. Для этого в блоке управляющих параметров необходимо описать требуемую зависимость (указать имена существующих переменных, зависящих от номера копии явно или неявно).
Каждый вектор, задающий направление оси системы координат копии определяется двумя точками. Первая точка имеет координаты <0.0.0>. Координаты вторых точек векторов, направляющих оси системы координат текущей копии, определяются параметрами X,Y,Z из соответствующей группы управляющих параметров.
В случае если векторы, определенные пользователем, не ортогональны или не образуют правую тройку, система доопределяет их автоматически. Определение осей идет по порядку X,Y,Z. Без изменения остаётся направление оси X, ось Y доворачивается до получения угла 90° в плоскости XY, затем определяется ось Z.
В случае, когда задано всего два вектора (например, для оси X и Z), то порядок доопределения векторов меняется и третий вектор (для оси Y) определяется в последнюю очередь.
Каждая копия профиля получается после копирования исходного профиля в направлении от глобальной системы координат к рассчитанной на данном шаге системе координат текущей копии.
Дополнительно можно выбрать локальную систему координат с помощью опции в автоменю:
![]() <6> Выбрать исходную систему координат
<6> Выбрать исходную систему координат
В этом случае при копировании исходного профиля будет использоваться выбранная система координат в качестве исходной.
При создании тела по параметрам по описываемой схеме, система вычисляет положение и ориентацию текущей копии профиля в следующем порядке:
1. Переменной, отвечающей за номер копии, присваивается следующее значение. 2. Вычисляются абсолютные координаты точки, определяющей положение начала для системы координат текущей копии. Расчёт ведется по выражениям в полях управляющих параметров (группа «Положение»). |
|
3. Вычисляются координаты векторов, определяющих направления осей системы координат текущей копии. Расчёт ведётся по выражениям в полях управляющих параметров (группа «Направление ») 4. Создается система координат копии, расположенная в точке начала координат копии и ориентированная в соответствии с определёнными векторами. |
|
5. Если геометрия 3D профиля каким-либо образом зависит от переменной, которой присваивается номер текущей копии, то профиль будет пересчитан с текущим значением переменной. 6. Исходный профиль копируется по направлению от исходной системы координат к полученной системе координат текущей копии. Если исходная система координат не выбиралась, то при копировании профиля в качестве исходной используется глобальная система координат. |
|
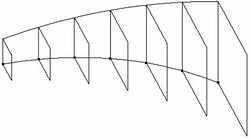
После расчёта всех копий исходного профиля результат объединяется в единое твердое или листовое тело сплайновыми поверхностями.
Пример 1
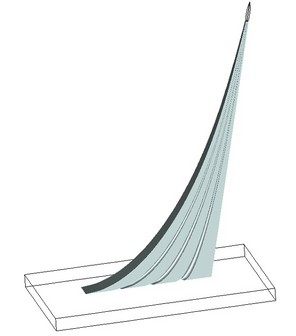
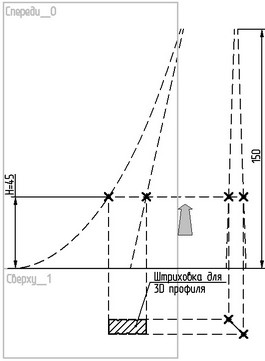
В качестве первого примера построим несложную модель (см. рисунок справа). Не будем останавливаться на подробностях создания вспомогательных 2D и 3D элементов построения, а вкратце рассмотрим сам принцип. Такую модель можно построить, если перемещать в пространстве 3D профиль, косвенно привязанный к нескольким направляющим. Будем использовать четыре направляющие на 2D виде: две определяют вид спереди и две – вид слева. Три направляющих являются прямыми, а одна – сплайном. |
|
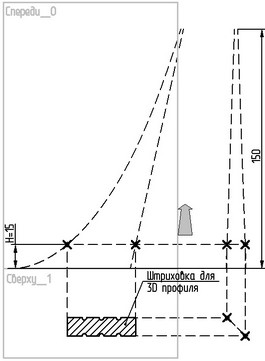
Проведена горизонтальная линия построения. Положение этой прямой определено выражением «Н-1». Таким образом, оно зависит от переменной «Н».
Поскольку ряд значений параметра «номер копии» начинается с единицы, иногда требуется вводить поправку (–1) в выражения, где участвует переменная «номер копии». В данном примере требуется, чтобы первая копия профиля располагалась у основания, т.е. имела координату Y=0.
На пересечении горизонтальной прямой и направляющих построены четыре 2D узла. Эти узлы определят длину и ширину профиля, если к ним привязать вертикальные прямые. Для привязки плоскости профиля, по одному из 2D узлов построен 3D узел. Канавки по бокам профиля построены таким образом, что всегда делят его сторону на четыре равные части. Радиус канавок линейно зависит от длины профиля.
Понадобится две рабочие плоскости – вид спереди и вид сверху. Первая нужна для построения 3D узла, а вторая – для создания профиля. Начало координат находится на уровне основания модели (см. рисунки). Из начала координат построена прямая под углом 45° к горизонтали. Она нужна для передачи связи от направляющих на виде слева к штриховке профиля на виде сверху.
Все построения увязаны между собой таким образом, что при изменении значения переменной «Н» происходит следующая цепочка изменений: горизонтальная прямая изменяет свое положение, вследствие чего изменяется положение зависящих от нее 2D узлов. Далее по цепочке изменится геометрия штриховки профиля, а также изменится положение 3D узла, к которому привязана плоскость 3D профиля. Соответственно, переместится в пространстве и сам 3D профиль.
В параметрах операции для хранения значения номера копии нужно назначить переменную «H». На закладке «Операция» нужно задать количество копий, соответствующее высоте модели с учетом поправки (150+1=151).
Описывать закон перемещения системы координат копии не нужно, поскольку исходный профиль перемещается сам при изменении номера копии. В результате получается, что система координат каждой копии совпадает с глобальной системой координат, поэтому текущая копия будет совпадать с исходным профилем по положению и геометрическим параметрам. Здесь важно только то, как движется исходный профиль при изменении переменной «H», то есть при изменении номера копии.
Описанный способ удобен при использовании данных двухмерного чертежа для построения сложной модели.
Пример 2
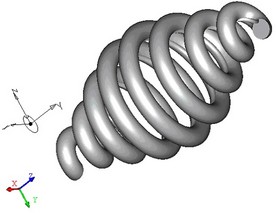
Второй пример демонстрирует метод построения модели, для которой известен точный закон перемещения профиля. Исходными данными для создания операции служат: 3D профиль; ЛСК, построенная в центре профиля и сориентированная относительно профиля как показано на рисунке (ось Z лежит в плоскости профиля и направлена на канавку); несколько независимых переменных.
В параметрах операции необходимо задать соответствующие выражения, как показано на следующих рисунках:

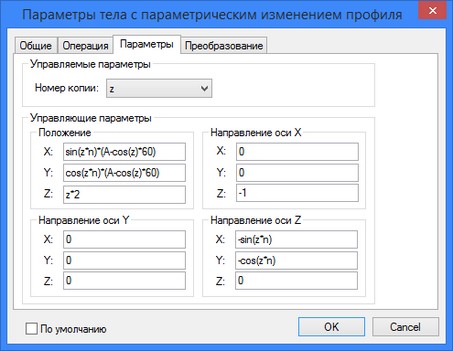
Выражения в группе «Положение» описывают винтовой закон с изменяющейся амплитудой. Амплитуда изменяется по закону косинуса.
Количество копий равно 360 из следующих соображений: 360 градусов – период используемых в выражениях тригонометрических функций.
Из рисунка видно, что ось Z исходной системы координат профиля должна быть всегда направлена в центр спирали (канавкой – к центру), ось X – в противоположном направлении по отношению к оси Z глобальной системы координат. Выражения, описывающие эти законы, находятся в соответствующих полях управляющих параметров. Ось Y определяется автоматически.
Способ ориентации копии по путям или поверхностям
Поскольку не всегда с помощью выражений удаётся точно описать закон изменения параметров копии, иногда удобно использовать 3D пути или поверхности других тел для определения положения и ориентации системы координат текущей копии.
Точка, определяющая начало системы координат текущей копии профиля, привязывается к 3D пути. Положением точки на этом пути можно управлять двумя способами.
Оси X и Y можно сориентировать по другим 3D путям или поверхностям других тел.
Выбор 3D пути для привязки начала системы координат копии осуществляется с помощью опции:
![]() <1> Выбрать кривую, задающий положение начала координат
<1> Выбрать кривую, задающий положение начала координат
Выбор элементов для определения ориентации осей X и Y (ось Z определяется автоматически) осуществляется с помощью следующих опций в автоменю:
![]() <1> Выбрать кривую, задающую положение начала координат
<1> Выбрать кривую, задающую положение начала координат
![]() <2> Выбрать кривую, задающий направление оси X
<2> Выбрать кривую, задающий направление оси X
![]() <3> Выбрать 3D путь, задающий направление оси Y
<3> Выбрать 3D путь, задающий направление оси Y
![]() <4> Выбрать поверхность, задающую ориентацию оси X
<4> Выбрать поверхность, задающую ориентацию оси X
![]() <5> Выбрать поверхность, задающую ориентацию оси Y
<5> Выбрать поверхность, задающую ориентацию оси Y
При создании операции с использованием 3D путей, закладки диалога «Операция» и «Параметры» несколько отличаются от описанных выше:
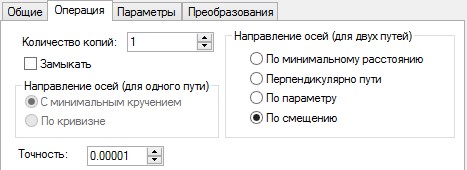
На этой закладке будут активны различные опции для управления направлениями осей. Какая группа будет активна, зависит от того, сколько путей было выбрано всего – один (только для определения начала системы координат копии) или два (для определения начала системы координат копии и для задания ориентации оси X и/или Y).
Группа «Направление осей (для одного пути)»:
●По кривизне. Ось X совпадает по направлению с вектором кривизны пути. Если 3D путь представляет собой прямую, то ось ориентируется по оси X глобальной системы координат.
●С минимальным кручением. Ось X направлена таким образом, чтобы обеспечить плавное вращение от положения вектора кривизны в начале пути к положению вектора кривизны в конце пути.
Ось Z всегда направлена по касательной к пути в точке начала координат текущей копии.
Направление оси Y, если оно не определено, вычисляется автоматически по осям X и Z.
Группа «Направление осей (для двух путей)»:
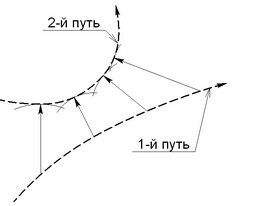
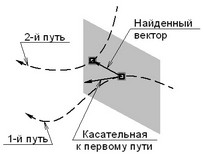
●По минимальному расстоянию между путями в точке начала координат. Из точки начала системы координат копии на первом пути строится вектор к ближайшей точке на втором пути. |
|
●Перпендикулярно пути. Перпендикулярно касательной к первому пути в точке начала координат строится плоскость. Вектор оси задаёт точка пересечения второго пути и плоскости. Если искомая точка не найдена, выдается сообщение об ошибке. |
|
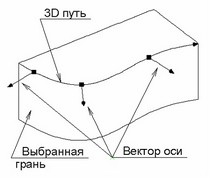
●По параметру/по смещению. Значение выражения в одном из этих полей управляющих параметров задают точку, принадлежащую второму пути, которая будет задавать направление оси. Если выбрана грань для ориентации оси, то в общем случае на грани определяется ближайшая точка до точки на пути, определяющей начало координат. Нормаль к поверхности грани в найденной на грани точке определяет направление оси. Наиболее прогнозируемый результат будет, если точка начала координат будет лежать на поверхности. Поэтому рекомендуется использовать грань для ориентации осей копии профиля в тех случаях, когда первый 3D путь принадлежит поверхности, выбираемой для ориентации профиля. |
|
Построенные таким образом оси X и Y могут быть не перпендикулярны (если они направлены параллельно, то система выдаёт сообщение об ошибке). В этом случае ось Y будет дополнительно ориентирована до перпендикуляра к оси X в плоскости, которой принадлежат обе оси. Ось Z будет определяться автоматически.
Если для оси X задан путь или грань, а для оси Y нет, то ось Z будет направлена по касательной к пути, задающему положение начала координат, а ось Y определится автоматически. Если оси X и Z не перпендикулярны, то ось X дополнительно ориентируется описанным выше способом.
Рассмотрим закладку «Параметры»:
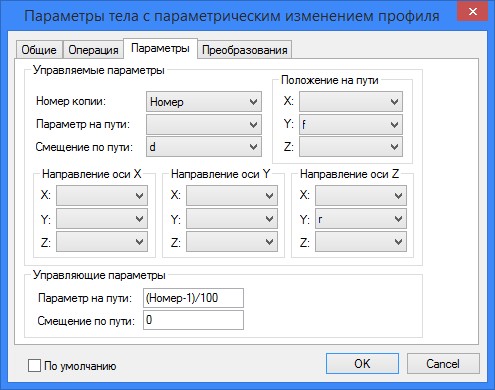
Как видно из рисунка, к группе управляемых параметров теперь относится не только параметр номер копии, а также группы положение на пути, направление оси X, направление оси Y, направление оси Z. Плюс к этим параметрам добавились параметр на пути и смещение по пути.
С помощью группы управляемых параметров «Положение на пути» можно считывать абсолютные координаты точки начала координат текущей копии. Управляемые параметры из групп «Направление оси …» позволяют получить значения координат для векторов осей системы координат копии. Вы можете использовать информацию о положении и ориентации текущей копии профиля в пространстве для задания связи с другими параметрами модели.
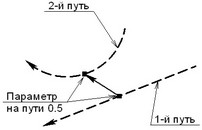
В группу управляющих параметров входят параметр на пути и смещение по пути. Параметр на пути и смещение по пути выполняют одну и ту же функцию – определяют положение точки на пути разными способами. Поэтому в полях управляющих параметров нельзя задать одновременно и параметр на пути, и смещение. Параметр на пути изменяется в пределах от 0 (в начале пути) до 1 (в конце пути); смещение по пути измеряется в единицах модели и равно длине участка пути от начала до искомой точки.
Если в соответствующем поле управляющих параметров вы описали функцию изменения параметра на пути, то управляемый параметр можно назначить только на смещение по пути, и наоборот.
Пример 3
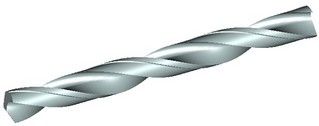
Рассмотрим создание тела по параметрам с использованием 3D путей на примере модели рабочей части сверла.
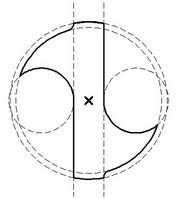
Создайте новый документ по прототипу с рабочими плоскостями. Следующий шаг – построение 3D профиля. Для этого активизируйте рабочую плоскость «Вид сверху» и начертите контур, как показано на рисунке. Для удобства профиль желательно построить таким образом, чтобы его центр находился в начале глобальной системы координат. В этом случае не потребуется строить локальную систему координат для привязки копии профиля к 3D пути во время создания операции.
Далее необходимо построить два 3D пути, с помощью которых профиль будет располагаться в пространстве при создании тела по параметрам. Путь, который отвечает за положение профиля, представляет собой прямую и совпадает с осью сверла. Его можно создать по двум 3D узлам, построенным на оси сверла. Длина этого пути будет определять длину рабочей части сверла. Другой путь отвечает за ориентацию профиля в пространстве и представляет собой винтовую линию. Второй путь легко построить с помощью цилиндрической рабочей поверхности.

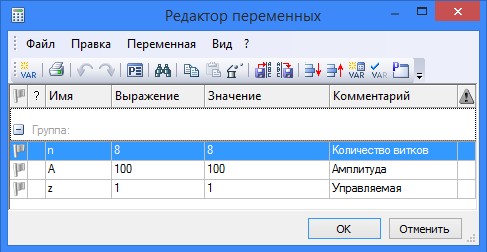
В редакторе переменных нужно создать независимую переменную для хранения значения номера копии. В данном примере была создана переменная s.
После вызова команды создания операции нужно выбрать 3D профиль, 3D путь для определения положения профиля и 3D путь для определения направления оси X. В параметрах операции на закладке «Операция» нужно задать количество копий – 101 (с учетом поправки) и выбрать опцию для двух путей по минимальному расстоянию.
На закладке «Параметры» выберите переменную s для номера копии. В данном примере из управляемых параметров нужен только этот.
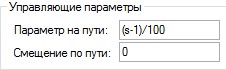
В поле управляющих параметров «параметр на пути» нужно вписать выражение, по которому будет рассчитываться положение профиля на пути в зависимости от номера копии. Следует помнить, что параметр на пути изменяется в пределах от 0 до 1.
В диалоге параметров операции, вызываемом опцией ![]() , можно задать общие параметры операции.
, можно задать общие параметры операции.
Для редактирования сечения используется команда 3ESA.
Смотри: Содержание , Команды T-FLEX CAD 3D в алфавитномпорядке