






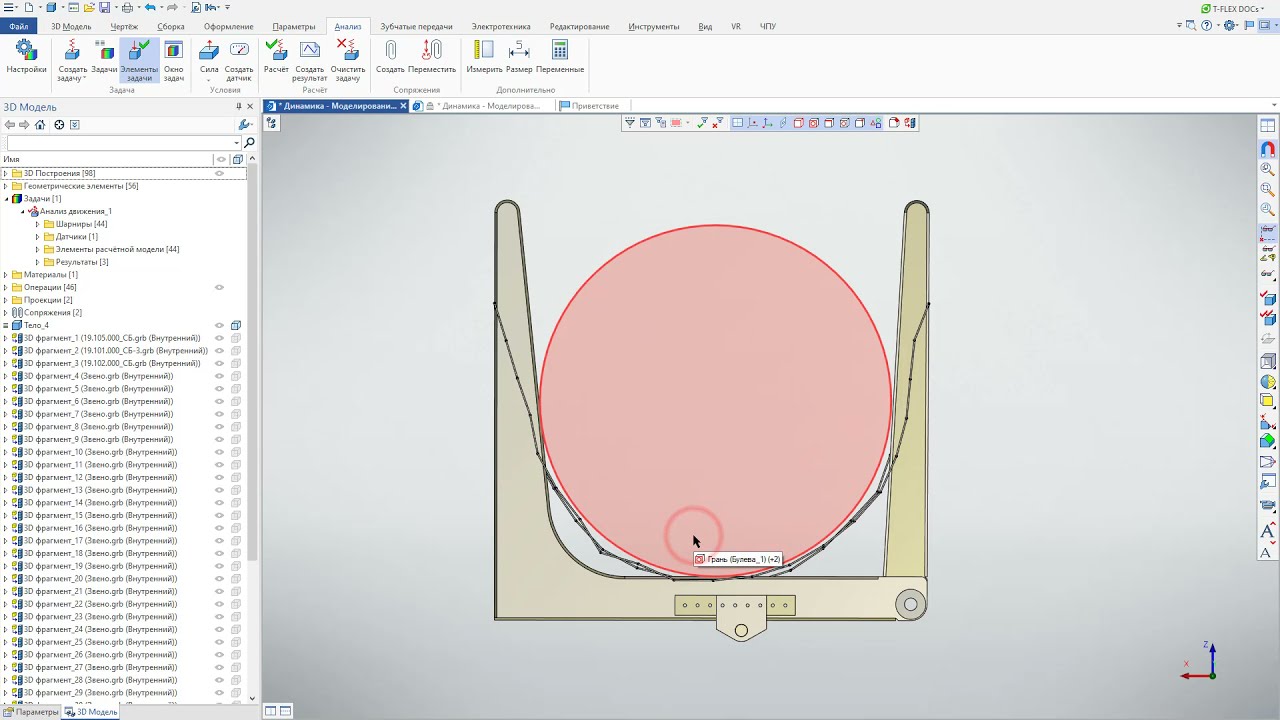
Задача на определение положения грузовой эстакады в момент сброса груза. Видео демонстрирует процесс создания датчика и вывод результатов расчёта.
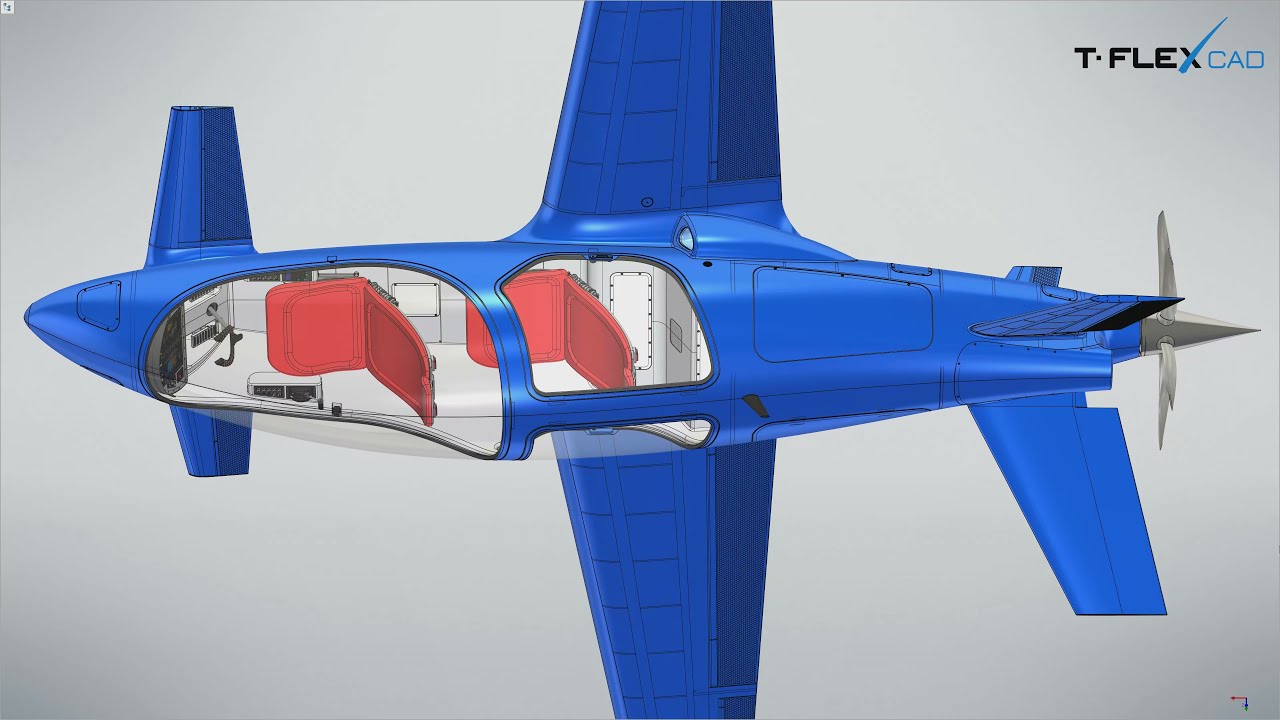
Видео в подробностях демонстрирует модель композитный самолёт с толкающим винтом для деловых перелётов, спроектированного в T-FLEX CAD 17. Модель является демонстратором возможностей системы T-FLEX CAD
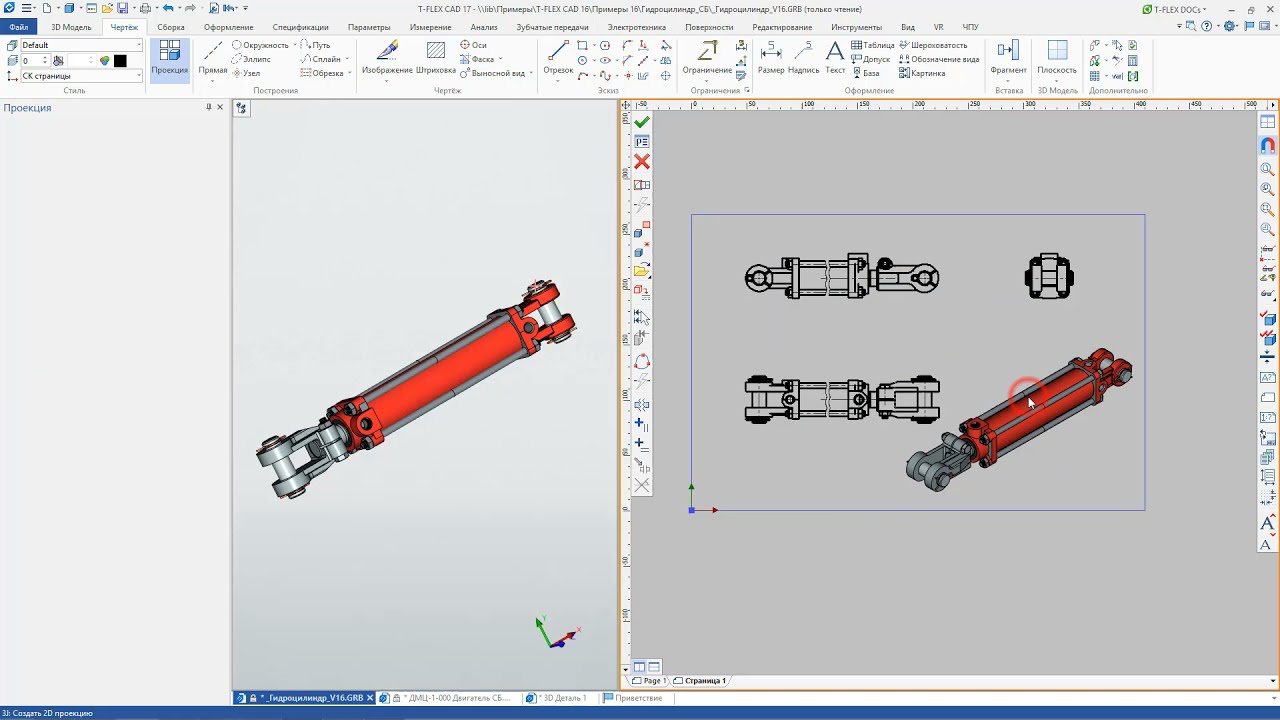
Видео демонстрирует работу с обновлённым механизмом 2D проекций - превью, перемещение, разрывы, обрезанный вид, перемещение с элементами оформления
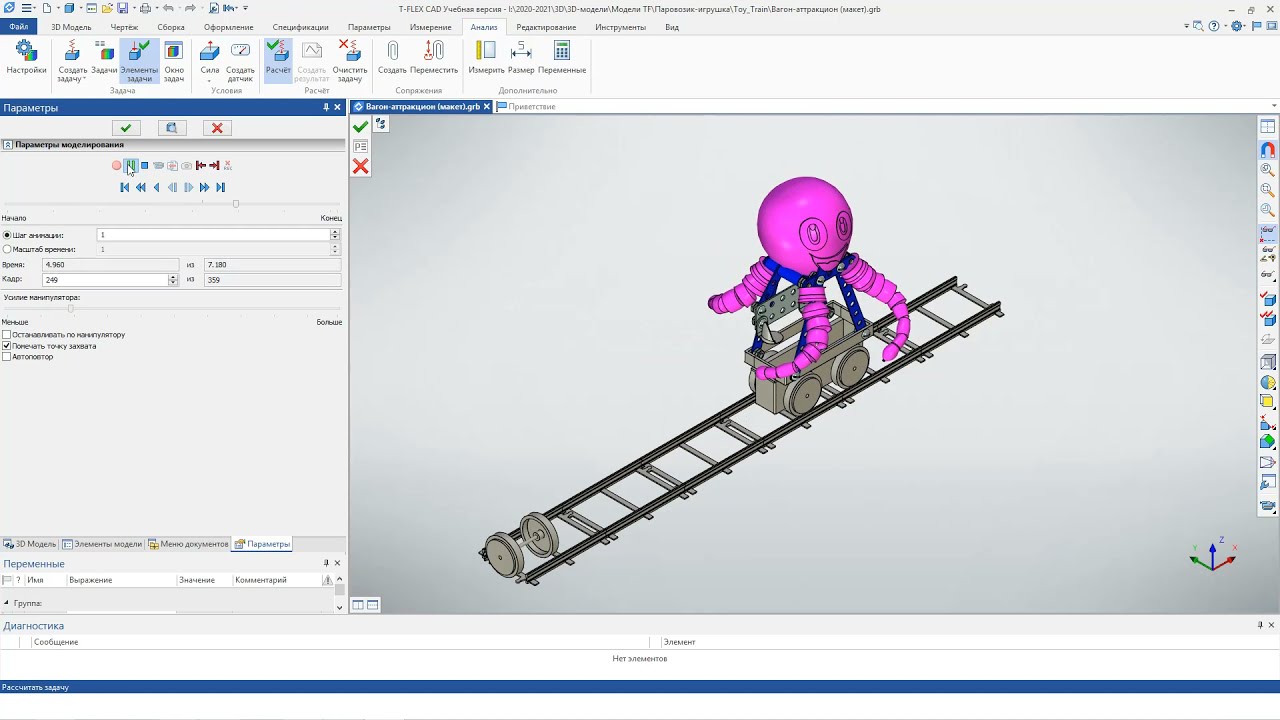
Ролик демонстрирует анимацию передвижения вагона по принципу телега-маятник.
Промо-видео с демонстрацией нового приложения T-FLEX Зубчатые передачи
Видео демонстрирует новый интерфейс команды Рабочая плоскость, а так же создание нового типа плоскости - Параллельно экрану
Видео демонстрирует обновлённый интерфейс операции отсечение, использование переменной для управления направлением отсечения
Видео демонстрирует использование панелей инструментов при работе в T-FLEX DOCs 17 с САПР T-FLEX CAD. Показаны измерения, анализ геометрии и создание замечаний
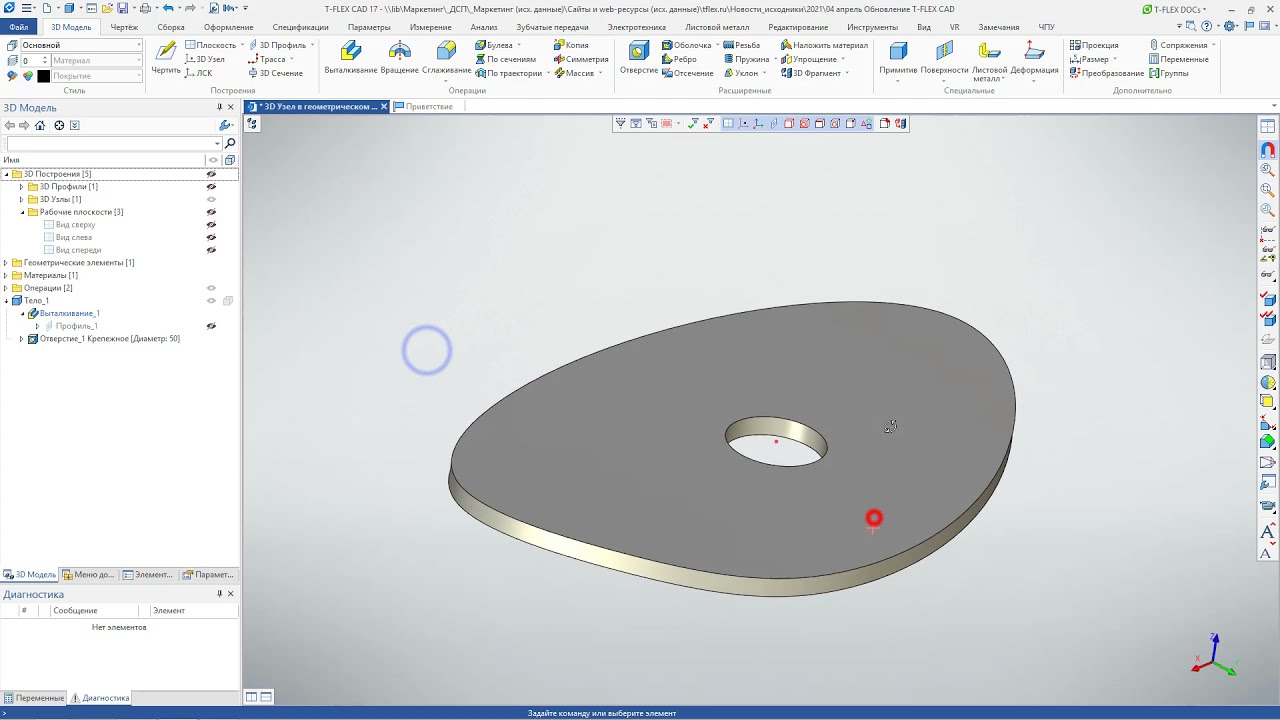
Видео демонстрирует построение 3D узла в геометрическом центре грани и ассоциативную связь отверстия, построенному по этому узлу
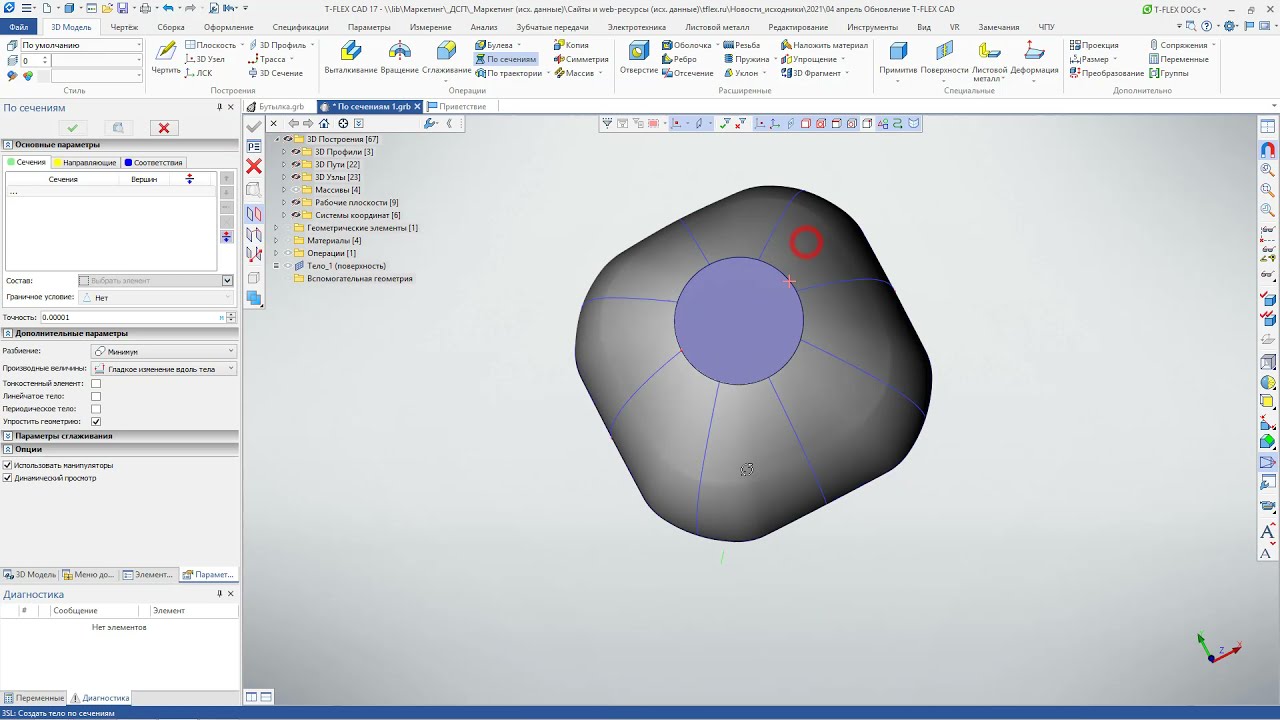
Видео демонстрируют работу обновлённого диалога операции По сечениям, возможность построения операции по выбранной траектории, использование неплоского сечения

Видео демонстрирует работу с манипуляторами и изменение параметров модели непосредственно в T-FLEX VR.
При наличии в сцене манипуляторов, связанных с переменными модели, эти манипуляторы можно задействовать в виртуальном пространстве и тем самым менять геометрию деталей и сборок. При этом, можно использовать как манипуляторы в текущей модели, так и манипуляторы из фрагментов, составляющих 3D сборку.

Видео демонстрирует быстрое переключение между камерами в T-FLEX VR.
В 3D сцене системы T-FLEX CAD может находится сразу несколько камер. T-FLEX VR позволяет быстро переключаться между ними.

Видео демонстрирует использование команды Взять в T-FLEX VR.
Команда позволяет выбрать объект в сцене и двигать и вращать и масштабировать с помощью контроллера так, будто бы объект находится в вашей руке. В зависимости от выбранных опций можно "брать" фрагменты, либо отдельные 3D тела.

Видео демонстрирует использование режима телепортации к объектам в T-FLEX VR.
В этом режиме пользователь указывает на ту часть 3D модели, которую он хочет увидеть ближе, и «телепортируется» так, чтобы максимально комфортно рассмотреть выбранный элемент 3D модели.

Видео демонстрирует использование команды Перемещение сопряжённых элементов в T-FLEX VR.
Данная команда доступна, если в модели созданы сопряжения. Тогда пользователь может перемещать элементы модели в соответствии с заданными сопряжениями.

Видео демонстрирует использование динамического сечения в T-FLEX VR.
При использовании этой команды в сцене появляется секущая плоскость, которую можно двигать динамически или установить в нужном положении.

Видео демонстрирует использование команды Скрыть/Показать в T-FLEX VR.
При использовании этой команды пользователь может выбрать объекты, которые нужно скрыть или сделать прозрачными. Опции команды также позволяют показывать/скрывать 3D построения.

Видео демонстрирует запуск сценариев анимации в T-FLEX VR.
Команда позволяет запустить выбранный сценарий анимации, например, анимацию сборки/разборки, и наблюдать за анимацией с любого удобного ракурса. Если модель содержит несколько сценариев, пользователь может выбрать нужный сценарий из списка.

Видео демонстрирует использование команды Измерить в T-FLEX VR.
В зависимости от выбранных опций, пользователь может измерять расстояние от контроллера до объекта, диаметры и длины рёбер, расстояние между вершинами и расстояние между элементами.

Видео демонстрирует использование команды Преобразования в T-FLEX VR.
Команда позволяет использовать VR-контроллеры для вращения/перемещения целиком всей 3D сцены. Команда особенно удобна для навигации внутри помещений.

Видео демонстрирует использование команды телепортации на пол в T-FLEX VR.
Команда перемещает пользователя в выбранную точку пространства так, что ноги пользователя оказываются в выбранной точке. То есть, пользователь как бы "встаёт" в выбранную точку. Этот режим навигации наиболее удобен когда пользователь хочет «ходить» внутри виртуальных объектов.




