Команда "3CM" - Перемещение сопряженных элементов



Команда "3CM" - Перемещение сопряженных элементов |
|
Вызов команды:
Пиктограмма |
Лента |
|---|---|
|
3D модель → Дополнительно → Перемещение элементов Сборка → Сопряжения → Переместить Листовой металл → Дополнительно → Перемещение элементов |
Клавиатура |
Текстовое меню |
<3CM> |
Сервис > Сопряжения > Перемещение элементов |
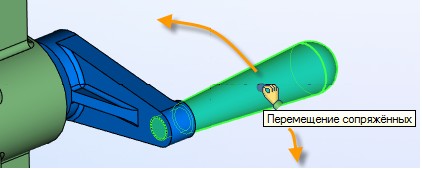
После вызова команды требуется выбрать нужную деталь механизма для задания движения. Движение задаётся перетаскиванием выбранной детали при помощи курсора. При этом пользователь имитирует воздействие на механизм, как если бы к выбранной точке детали была приложена сила, направленная в сторону курсора в плоскости экрана. Под воздействием силы деталь механизма начинает двигаться. Движение ограничено заданными сопряжениями с другими деталями и внешним пространством. Выбранная деталь тянет за собой другую и т.д., пока в движение не будет вовлечён весь механизм. При этом во время движения учитывается масса и моменты инерции перемещаемых компонентов.
Любые параметры перемещения и поворота сопряженных объектов записываются в свойства каждой сопряженной операции. Для этого в параметрах операции создаётся специальный вид преобразования «Преобразование сопряжений». Все количественные свойства этого преобразования рассчитываются системой автоматически.
При перемещении сопряжённых элементов следует учитывать несколько важных факторов:
1. Точные количественные параметры перемещения не задаются.
2. После завершения команды перемещения по ![]() положение деталей точно вернуть в предыдущее состояние нельзя. В крайнем случае, это можно сделать только посредством выполнения отмены действий в текущей сессии.
положение деталей точно вернуть в предыдущее состояние нельзя. В крайнем случае, это можно сделать только посредством выполнения отмены действий в текущей сессии.
3. При перемещении модели механизма, для которого оформлен сборочный чертёж, есть опасность невосстановимого изменения чертежа, построенного проецированием. Это произойдет после обновления проекции, из-за нового положения деталей сборки и сложности точного возврата к предыдущему состоянию положения деталей.
Настройка режимов движения осуществляется в окне свойств.
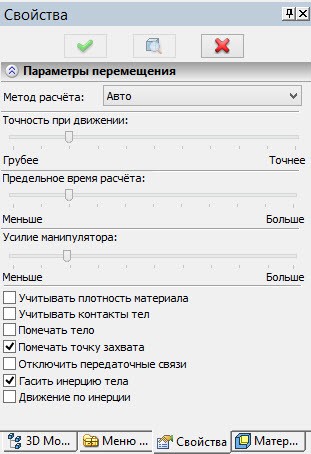
«Метод расчёта» устанавливает один из двух доступных методов расчёта – точный или быстрый. Точный метод нужно применять для систем содержащим до нескольких десятков шарниров, чем больше порядок системы, тем медленнее будет работать расчёт. Для систем включающих в себя сотни шарниров расчёт может работать неудовлетворительно медленно. В таких случаях следует применять быстрый метод, который одинаково хорошо справляется и с большими и с маленькими системами. Режим «Авто» разрешает системе подобрать метод расчёта самостоятельно в зависимости от сложности модели.
Для перемещения деталей механизма используется режим кинематического манипулятора. При этом формируется плавное движение. Оно имитирует следствие приложения силы в точку, за которую пользователь тянет деталь. Движение строится с учётом всех заданных ограничений. При достижении границы области решений механизм останавливается.
Точность при движении. Задаёт заниженный уровень точности вычислений для более быстрого расчёта и соблюдения условий сопряжения в момент движения механизма.
Предельное время расчёта. Задаёт количество шагов-вычислений, которое разрешается применить системе для достижения точности вычислений при движении.
Учитывать плотность тел. Для более точной имитации движения механизма имеется возможность учитывать реальную плотность при расчёте массы его деталей. В противном случае плотность устанавливается одинаковой для всех компонентов.
Учитывать контакты тел. Для более точной имитации движения механизма имеется возможность учитывать пересечения объектов.
Помечать тело. Вспомогательный параметр, позволяющий включать/отключать пометку детали механизма, за которую тянет пользователь для создания движения.
Помечать точку захвата. Данный параметр включает пометку точки, за которую тянет курсор. Точка помечается крестиком. Эту функцию можно использовать при отключении пометки тела.
Отключить передаточные связи. Данная настройка позволяет отключать передаточные сопряжения. Эту возможность удобно использовать для приведения звеньев передач к исходному взаимному соответствию (например, контактное зацепление зубьев шестеренок).
Гасить инерцию тела. Данный параметр позволяет отключать и подключать учет инерции тел.
Движение по инерции. Данный параметр позволяет учитывать инерцию без ее угасания со временем.
Имеется упрощённый способ изменить положение 3D элемента в пространстве в рамках заданных степеней свободы. Для активации этой возможности нужно выбрать объект в сцене, используя фильтр ![]() . Через секунду после выбора появляется небольшой манипулятор в форме окружности, с помощью которого можно перемещать элемент.
. Через секунду после выбора появляется небольшой манипулятор в форме окружности, с помощью которого можно перемещать элемент.
Оптимальная длина цепочек сопряжений
При создании механизма одна деталь «цепляется» к внешней среде, другие детали посредством сопряжений стыкуются друг к другу. Таким образом, ряд деталей, последовательно состыкованных друг с другом, можно представить как цепочку сопряжений. Если к одной детали присоединено одновременно несколько других деталей, то цепочка сопряжений разветвляется. При создании механизмов необходимо стремиться к максимально коротким цепочкам. Более короткие цепочки решаются быстрее и при этом возникает меньшая погрешность вычислений.
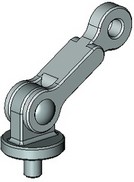
Рассмотрим следующий характерный пример – необходимо создать модель простого механизма, показанную на рисунке. Механизм представляет собой соединение шарнирного типа, объединяющее вместе три детали – опору, рычаг и ось. Наиболее рациональным способом в данном случае будет создание двух маленьких цепочек сопряжений, а не одной длинной.
Рычаг нужно при помощи сопряжений соосности и совпадения плоских граней сразу привязать к опоре. Ось также при помощи соосности и совпадения привязывается к любой детали, например, к опоре. Получается две цепочки сопряжений: опора-рычаг и опора-ось. В данном случае нерационально было бы, например, к опоре привязать ось, а к оси привязывать рычаг, так как получилась бы более длинная цепочка сопряжений «опора-ось-рычаг».
|
|
|
Пример механизма |
Детали механизма |
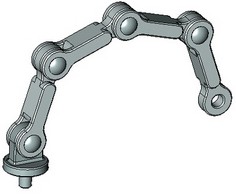
Усложнение механизма (добавление новых сопряжений) |
|
|
Рациональная цепочка |
Нерациональная цепочка |
Конечно, на таком простом примере сколько-нибудь заметного ухудшения производительности системы не произойдет, но в более сложных случаях разница становится заметна.
Смотри: Содержание, Команды T-FLEX CAD 3D в алфавитном порядке