3D профиль по развёртке поверхностей |
  
|
3D профиль по развёртке поверхностей |
|
Вызов команды:
Пиктограмма |
Лента |
|
3D Модель > Построения > Развёртка 3D профиля Листовой металл (3D) > Построения > Развёртка 3D профиля Поверхности > Построения > Развёртка 3D профиля Сварка > Построения > Развёртка 3D профиля Примитив > Построения > Развёртка 3D профиля Опорная геометрия > 3D Профиль > Развёртка 3D профиля |
Клавиатура |
Текстовое меню |
<3KRS> |
Построения > 3D Профиль > Развёртка 3D профиля |
Автоменю команды |
|
<S> |
Построить развёртку поверхностей |
Данный способ позволяет получить развёртку исходной грани либо набора граней в виде плоского 3D профиля. Для формирования развёртки используется два основных метода – аналитический и метод аппроксимации.
Результирующий 3D профиль строится в плоскости, касательной к поверхности исходной грани, в точке касания. Точка касания должна принадлежать исходной грани.
После активации данного способа создания 3D профиля необходимо указать исходную грань (набор граней). Выбор осуществляется в 3D сцене (при помощи ![]() ) либо в дереве модели при активной опции автоменю:
) либо в дереве модели при активной опции автоменю:
|
<O> |
Выбор поверхностей |
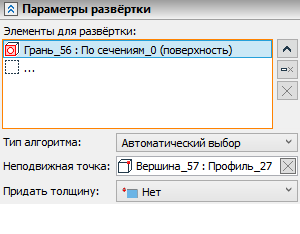
Все выбранные грани отображаются в окне параметров в списке Элементы для развёртки, управление которым осуществляется при помощи кнопок Развернуть ![]() , Свернуть
, Свернуть ![]() , Удалить элемент из списка
, Удалить элемент из списка ![]() , Очистить
, Очистить ![]() .
.
Следующим шагом создания 3D профиля является выбор алгоритма формирования развёртки. В выпадающем списке Тип алгоритма доступны следующие опции:
•Автоматический выбор, при котором система стремится развернуть исходную поверхность аналитически. В противном случае запускается итерационный алгоритм;
•Итерационный, при котором система разворачивает сеточную аппроксимацию исходной поверхности (методом аппроксимации).
В зависимости от выбранного алгоритма формирования развёртки меняется набор параметров создаваемого 3D профиля.
Выбор исходной точки касания профиля и грани (набора граней) осуществляется в 3D сцене (при помощи ![]() ) либо в дереве модели при использовании следующей опции автоменю:
) либо в дереве модели при использовании следующей опции автоменю:
|
<A> |
Выбор точки касания профиля и исходной грани |
Указанная точка отображается в поле Неподвижная точка, отмена и повторный выбор которой осуществляется при помощи кнопки Очистить ![]() .
.
Автоматический выбор алгоритма развёртывания
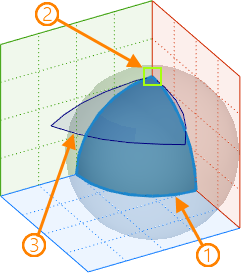
В основе данного алгоритма создания 3D профиля лежит аналитический метод развёртывания поверхности (набора поверхностей). Аналитический метод применяется для развёртываемых поверхностей. К развёртываемым относятся линейчатые поверхности, которые могут быть развёрнуты так, чтобы всеми своими точками они совмещались с плоскостью без каких-либо повреждений поверхности (разрывов или складок). При этом поверхность может быть как замкнутой (периодической), так и незамкнутой.
|
1 – исходная грань |
Точка касания создаваемого профиля и исходной грани может быть задана любым 3D объектом, способным определить точку (например, 3D узлом или вершиной тела). Заданная точка должна лежать на исходной грани.
Если исходная грань является замкнутой (периодической), заданная точка касания профиля и грани по умолчанию используется для задания линии разреза развёртки. Разрезание производится по образующей прямой, проходящей через данную точку.
|
1 – исходная грань |
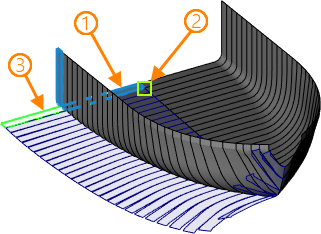
Существуют два частных случая, в которых допускается управлять линией разреза замкнутой грани: развёртка цилиндра и конуса.
В случае построения 3D профиля как развёртки замкнутой цилиндрической поверхности линия разреза развёртки может проходить:
•По образующей, проходящей через точку касания профиля и грани;
•По образующей, проходящей через дополнительную 3D точку;
•По 3D пути, лежащему на той же геометрической поверхности, что и разворачиваемая грань (например, можно создать произвольный 3D путь и спроецировать его на грань или построить путь в цилиндрической системе координат с тем же положением и радиусом, что и разворачиваемая грань; при этом его концы должны лежать на внешних границах грани).
Указание объекта для определения линии разреза осуществляется в 3D сцене либо дереве модели после выбора замкнутой цилиндрической грани при активации опции автоменю:
|
<S> |
Задать линию разреза |
Указанный объект отображается в поле Разделяющий элемент в окне параметров, отмена и повторный выбор осуществляется при помощи кнопки ![]() Очистить.
Очистить.
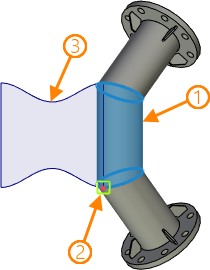
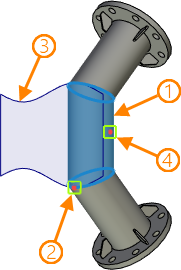
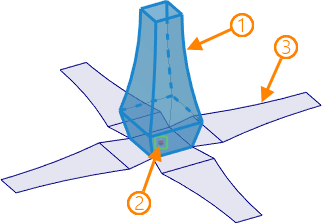
1 – исходная замкнутая цилиндрическая грань
2 – точка касания исходной грани и 3D профиля
3 – результирующий 3D профиль-развёртка
4 – дополнительный объект, определяющий линию разреза
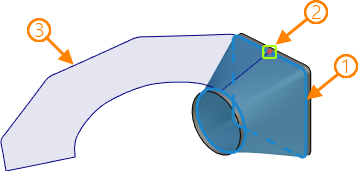
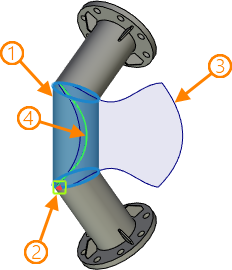
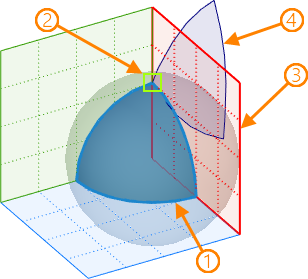
В случае построения 3D профиля как развёртки замкнутой конической поверхности линия разреза развёртки может проходить:
•По образующей, проходящей через точку касания профиля и грани;
•По образующей, проходящей через дополнительную 3D точку.
Указание точки для определения линии разреза осуществляется в 3D сцене либо дереве модели после выбора замкнутой конической грани при активации опции автоменю:
|
<S> |
Выбор точки для задания линии разреза |
Указанный объект отображается в поле Разделяющий элемент в окне параметров, отмена и повторный выбор осуществляется при помощи кнопки ![]() Очистить.
Очистить.
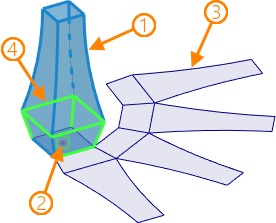
1 – исходная замкнутая коническая грань
2 – точка касания исходной грани и 3D профиля
3 – результирующий 3D профиль-развёртка
4 – дополнительная точка, определяющая линию разреза
Построение развёртки набора граней с автоматическим выбором алгоритма
При создании 3D профиля как развёртки на основе набора граней исходные грани должны иметь общие рёбра.
Если среди набора развёртываемых граней присутствует хотя бы одна неразвёртываемая, система запускает итерационный алгоритм формирования развёртки.
При развёртывании исходного набора граней может возникать несколько решений. По умолчанию система самостоятельно выбирает оптимальное решение. Для получения конкретного варианта развёртки нужно указать неразрывные рёбра, которые используются в качестве линий развёртки. При задании рёбер следует указывать связи между всеми необходимыми гранями. В противном случае грань, для которой не задано неразрывное ребро, связывающее её с другими гранями набора, будет проигнорирована при создании профиля.
1 – исходный набор граней
2 – точка касания исходной грани и 3D профиля
3 – результирующий 3D профиль-развёртка
4 – набор неразрывных рёбер
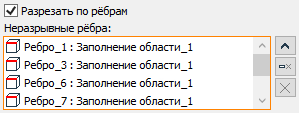
Для указания неразрывных рёбер необходимо установить флаг Разрезать по рёбрам, после чего выбрать необходимые рёбра в 3D сцене (при помощи ![]() ) при активной опции автоменю:
) при активной опции автоменю:
|
<E> |
Выбор неразрывных рёбер |
Все выбранные Неразрывные рёбра отображаются в одноимённом списке окна параметров. Управление видимостью и составом списка осуществляется при помощи кнопок Развернуть ![]() , Свернуть
, Свернуть ![]() , Удалить элемент из списка
, Удалить элемент из списка ![]() , Очистить
, Очистить ![]() .
.
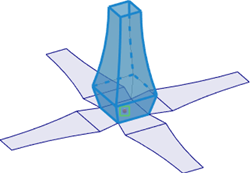
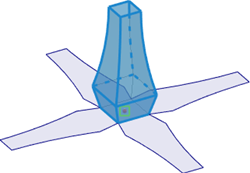
По умолчанию на создаваемом 3D профиле рёбра – границы граней исходного набора удаляются. При необходимости они могут быть сохранены (при установке флага Оставлять внутренние рёбра).
|
|
Внутренние рёбра сохранены |
Внутренние рёбра удалены |
Итерационный алгоритм развёртывания
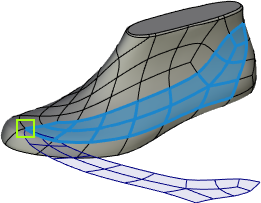
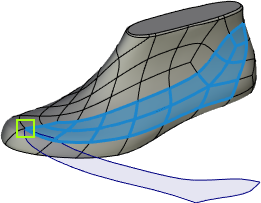
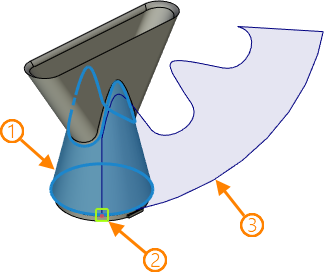
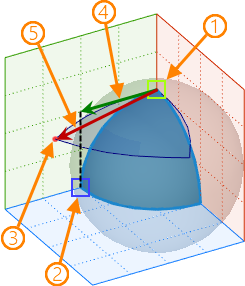
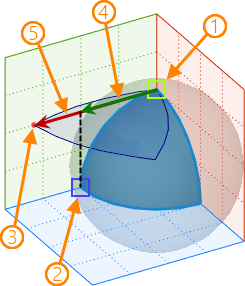
В основе данного алгоритма создания 3D профиля лежит метод аппроксимации. Метод аппроксимации используется для неразвёртываемых поверхностей. К неразвёртываемым относятся нелинейчатые поверхности и те линейчатые, которые не могут быть развёрнуты в плоскость без повреждения поверхности. Система аппроксимирует (заменяет) исходную поверхность сегментами развёртываемых поверхностей, разворачивая каждый из них; результирующий 3D профиль является совокупностью выполняемых итераций. При этом исходная поверхность должна быть незамкнутой. Данный метод даёт приближённый результат.
1 – исходная грань
2 – точка касания исходной грани и 3D профиля
3 – результирующий 3D профиль‑развёртка
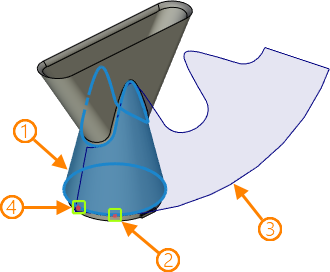
Точка касания при использовании данного алгоритма развёртывания может быть задана только одной из вершин исходной грани.
Для ориентации профиля в плоскости касания, можно указать дополнительную 3D точку, задающую направление проецирования, которая тоже может быть выбрана только среди вершин исходной грани. Вектор (5), образованный неподвижной точкой касания (1) и проекцией дополнительной точки на развёртке (3) совпадёт с вектором (4), образованным неподвижной точкой (1) и непосредственно дополнительной точкой (2).
Выбор дополнительной точки осуществляется в 3D сцене либо дереве модели при помощи следующей опции автоменю:
|
<D> |
Выбор точки для ориентации профиля |
Указанная точка отображается в поле Точка, задающая направление, отмена и повторный выбор которой осуществляется при помощи кнопки ![]() Очистить.
Очистить.
Также допускается задать 3D объект, способный определить плоскость в пространстве, параллельно которой будет располагаться результирующий профиль развёртки.
Выбор объекта осуществляется в 3D сцене либо дереве модели при помощи следующей опции автоменю:
|
<P> |
Выбор плоскости задания для ориентации развёртки |
Выбранный объект отображается в поле Плоскость для ориентации, отмена и повторный выбор которой осуществляется при помощи кнопки ![]() Очистить.
Очистить.
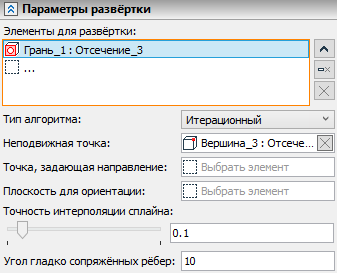
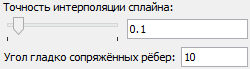
Точность контура результирующей развёртки регулируется параметрами:
•Точность интерполяции сплайна – параметр в безразмерном виде, от 0.000001 до 1.
•Угол гладко сопряжённых рёбер - предельно допустимый угол (в градусах), при котором рёбра исходной геометрии будут считаться гладко сопряженными; необходим для устранения угловых стыков, получаемых при решении.
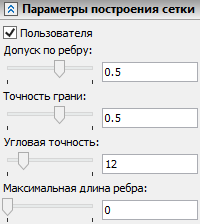
Возможность управления точностью аппроксимации исходной грани осуществляется при помощи Параметров построения сетки:
•Допуск по ребру – максимальное расстояние между кривыми модели и аппроксимирующими их рёбрами сетки.
•Точность грани – максимальное расстояние между поверхностями модели и аппроксимирующими их плоскими гранями сетки.
•Угловая точность – максимальный угол между кривыми модели и аппроксимирующими их рёбрами сетки, задаваемый в градусах. Угол измеряется как сумма углов между рёбрами сетки и касательными к исходной кривой в конечных точках рёбер. Данный параметр также определяет максимально допустимый угол между поверхностями модели и аппроксимирующими их плоскими гранями сетки (т.е. угол между нормалями поверхности и грани).
•Максимальная длина ребра – максимальная длина ребра конечного элемента генерируемой сетки. Если значение равно нулю, то система игнорирует этот параметр.
Построение развёртки набора граней итерационным алгоритмом
Итерационный алгоритм также позволяет получить развёртку набора смежных граней. При этом необходимо учитывать, что исходные грани не должны образовывать замкнутый контур, так как данный алгоритм развёртывания не предусматривает возможность задания разрезки по рёбрам.
При формировании профиля также допускается сохранять рёбра – границы граней.
|
|
Внутренние рёбра сохранены |
Внутренние рёбра удалены |