Общие сведения о рабочей поверхности |
  
|
Общие сведения о рабочей поверхности |
|
Рабочие поверхности определяются с помощью специальных параметрических систем координат:
•цилиндрической;
•сферической;
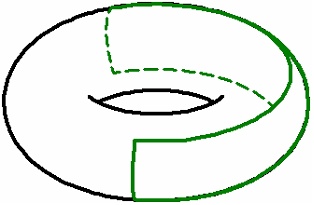
•тороидальной.
Отсчёт параметрических координат (их смысл и диапазон зависят от типа поверхности) всегда ведётся относительно ортогональной (декартовой) системы координат. В качестве таковой может использоваться как глобальная система координат, так и специально выбранная локальная система координат (ЛСК).
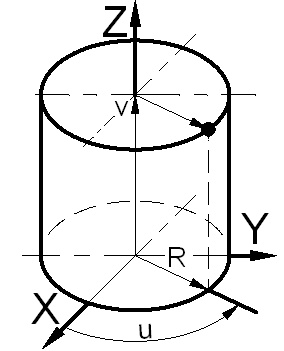
В цилиндрической системе координат положение точки определяется тремя параметрами – величиной радиуса цилиндра, смещением вдоль оси цилиндра (оси Z) и углом (или длиной дуги) между осью X и проекцией радиус-вектора точки на плоскость XY.
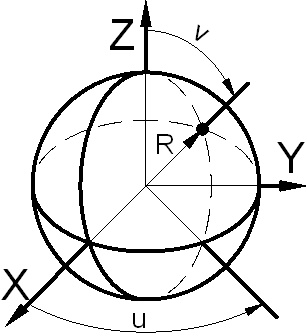
В сферической системе координат положение точки определяется тремя параметрами – величиной радиуса сферы, углом между осью X и проекцией радиус-вектора точки на плоскость XY, углом между радиус-вектором и осью Z.
В тороидальной системе координат положение точки определяется четырьмя параметрами – двумя определяющими радиусами тора, углом между осью X и проекцией радиус-вектора на плоскость XY, углом в плоскости Z-радиус-вектор.
Параметры, задающие радиус цилиндра, сферы, два радиуса тора являются фиксированными, т.е. совпадают у точек, принадлежащих одной и той же поверхности. Это константная характеристика данной поверхности. У цилиндра и сферы – один фиксированный параметр-радиус, у тора – два (два радиуса тора).
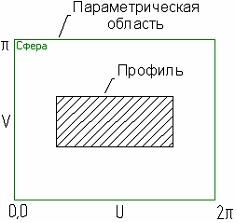
Таким образом, положение точки поверхности любого типа в специальной системе координат фактически определяется двумя параметрическими ортогональными координатами (U и V). Благодаря этому любую из специальных систем координат можно связать с прямоугольной областью на плоскости (параметрической 2D областью). 2D область будет представлять собой "развертку" поверхности на плоскость (согласно формулам преобразования UV-координат в декартовы координаты для выбранного типа поверхности), играя ту же роль, что и изображение рабочей плоскости на странице 2D чертежа. Кроме того, 2D область будет определять диапазон изменения UV-координат.
Введение параметрической 2D области позволяет работать с поверхностью как с обычной рабочей плоскостью.
Сферическая система координат
Графическая Иллюстрация |
Параметрическая 2D область |
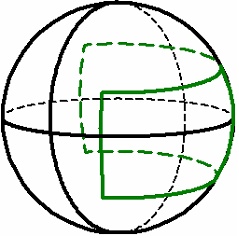
Профиль в 3D |
|
U – угол от оси X (0-2p) V – угол от оси Z (0-p) R – радиус сферы |
|
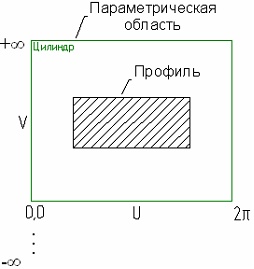
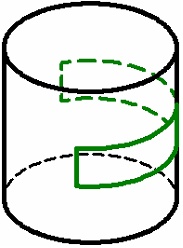
Цилиндрическая система координат
Графическая Иллюстрация |
Параметрическая 2D область |
Профиль в 3D |
|
U – угол от оси X (0-2p) или длина дуги от оси X (0-2pR) V - координата Z (-Ґ,+Ґ) R – радиус цилиндра |
|
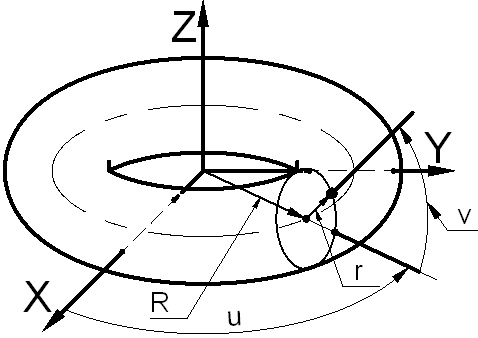
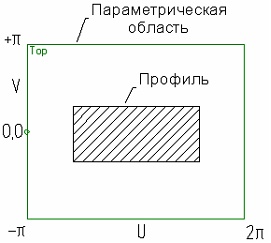
Тороидальная система координат
Графическая Иллюстрация |
Параметрическая 2D область |
Профиль в 3D |
|
U – угол от оси X (0-2p) V – угол от радиус-вектора R в плоскости ZOR (-p,+p) R – большой радиус тора, r – малый радиус тора |
|
Данные, необходимые для создания рабочей поверхности
При создании рабочей поверхности любого типа задаются:
•Параметрическая 2D область (прямоугольная область на 2D чертеже) – развёртка создаваемой поверхности на плоскость;
•Значение фиксированного параметра для данной поверхности (радиуса сферы или цилиндра, двух радиусов тора);
•Исходная декартова система координат (глобальная система координат или произвольная ЛСК), относительно которой задаются параметрические координаты поверхности.
Отображение рабочих поверхностей в 3D окне
Возможность отображения рабочей поверхности в 3D окне зависит от установленного в её параметрах состояния флага Показывать в 3D окне.